カンキツ園におけるドローンセンシング
-
RESTEC月例講演会
講演:佐藤 優賛 氏
(静岡県農林技術研究所 果樹研究センター)
RESTECでは社内勉強会として毎月1回、様々な分野の方にご講演をいただいています。
2023年6月に、カンキツ栽培へドローンセンシングを活用したスマート農業の取組について、静岡県農林技術研究所果樹研究センターの佐藤氏にご講演頂いた内容をご紹介します。
-
まず自己紹介をいたします。1987年に静岡県富士市に生まれ、その後転勤族の親の仕事の都合により、兵庫県川西市や滋賀県大津市で過ごしました。大学は静岡大学農学部に在籍し、4年生から修士まで3年間は果樹園芸学研究室に所属し、果樹園芸を勉強してまいりました。その後2013年に静岡県庁へ入庁し現在11年目になります。最初の4年間は県の出先機関にいましたが、2017年から果樹研究センターにおいてドローンセンシングの研究を担当しています。それまで果樹研究センターでは、栽培技術に関する研究課題が多かったので、センシングに関する研究をまさか私が担当するとは思っておらず、非常にびっくりしたというところが正直なところです。
果樹研究センターがRESTECさんと共同研究という形でお付き合いさせていただいて8年目に、私個人は7年目になります。
本日の講演は6つの内容で行います。ミカンの生産状況に関する話はなかなか普段皆さん耳にされないかと思います。
まず果樹研究センターの紹介です。その後、カンキツ生産を取り巻く状況ということで、主に本県のミカン栽培を簡単に説明した後、研究に用いるドローンと農業についてお話しします。次いで、実際にドローンをカンキツ園で使うということを、5番目に現在進めている研究内容をお話しし、最後に社会実装に向けた取り組みをご紹介します。
果樹研究センターの紹介
果樹の研究拠点は、昔は県内4カ所にありました。そのうち伊豆分場は伊豆農業研究センターになり、西遠分場は閉所し、落葉果樹分場は、現在清水区駒越の果樹研究センターに統合されたのち平成27年に清水区茂畑に移転しています。海に面した清水区ですが、茂畑は山側に位置しております。センターのある場所も、もともと山だったところを基盤整備事業によって切り崩して平らな土地を作って農地を造成し、一部の土地を果樹研究センターとして利用しています。
このような農地整備を行う理由ですが、造成前は急傾斜の山で、きついところでは勾配が20度以上あるような場所でした。担い手の高齢化が進む中で傾斜地では作業が大変で、農地が荒廃していくのではという問題もあり、平らで作業しやすい農地を造成しようという政策のもと、大規模な基盤整備事業が行われました。
果樹研究センターが立地する茂畑地区についても、平成23年から造成工事が始まり、その一部に果樹研究センターが作られました。標高は200m以上あり、県内の産地と比べて比較的高いところになります。続きまして果樹研究センターの組織についてです。果樹研究センターは農林技術研究所の一部になっております。農林技術研究所の本所は磐田市にあり、野菜、花、水稲などの研究をしております。他に菊川市に茶業研究センター、浜松市に森林林業研究センター、東伊豆町に伊豆農業研究センターがあり、その作物が盛んな地域に、それぞれの研究センターが作られています。
では、果樹研究センターの組織を細かく見ていきますと、主職員、正規職員数は24名で、研究職員は15名です。1室3科の組織のうち果樹生産技術科、果樹環境適応技術科、果樹加工技術科が果樹の研究課題を担当しています。続いてそれぞれの科の研究を紹介します。
まず、私が所属している果樹生産技術科では、カンキツの育種や栽培に関する研究を行っています。具体的には、カンキツの新品種開発、果樹の省力安定生産技術の開発、そして大規模化のための技術開発です。
果樹環境適応技術科は、果樹の土壌肥料や病害虫防除に関する研究を行っています。生産効率の高い防除施肥技術の開発、栽培上問題となる病害虫への対策技術の開発、あとは、近年のテーマとして、環境と調和した持続可能な栽培技術の開発です。
果樹加工技術科では、果実の加工技術と、本県で一部栽培されている落葉果樹に関する育種や栽培に関する研究を行っています。具体的には新たな果樹の加工品開発や支援、落葉果樹の省力安定生産技術の開発、梨やキウイなどの新品種の開発です。研究所の大きな研究テーマとして、以前は手間をかけてでもとにかく高品質なものをたくさん取ることを目的としたテーマで研究が行われることが多かったのですが、生産者の減少問題などもあり、省力化や効率化が、トレンドになっています。昔とは、研究の目的が少し変わってきています。
カンキツ生産を取り巻く状況
ミカンは、日本ではリンゴと並ぶ2大果実です。令和4年の全国のミカンの出荷量は、613,000トンあって、ほぼリンゴと同じです。その内訳を見ていきますと、静岡県の出荷量は88,900トンで3番目ですが、近年は愛媛県と並び全国的には2から3番目の産地となっております。
3 0~40年前は静岡県が1番目だったときもありました。「愛和静か」という言葉がありまして、愛媛の愛、和歌山の和、静岡の静かとして、ミカンのトップ3県を表していた時代もあったようです。ただ、近年の出荷量は和歌山県が少し抜け出しているような状況です。
続いて静岡県におけるミカンの位置づけをご説明します。令和2年の静岡県の農業産出額をご紹介します。
静岡県の農業産出額の特徴は、園芸作物の割合が高い点です。水稲がかなりの割合を占める県などが比較的多いですが、静岡県の場合、一番が野菜になります。次いで畜産、果樹は3番目の品目で、数字で言いますと254.7億円です。あとは水稲、花き、お茶、その他と続きます。このように、本県における果樹ミカンの位置づけは非常に高いものとなっており、ミカンの生産に特化した政策を独自に行ったりしています。
ミカンの経年的な出荷量推移を説明します。簡単に言ってしまいますと1975年と2022年の出荷量を比較すると最盛期の3割以下という状況で、かなり減少しています。ただ、2010年以降は少ないながらも出荷量としては比較的安定し、何とか踏ん張っているような状況です。しかし、国内の需要を考慮すると、供給量は不足している状況が続いています。裏を返すと作れば売れる生産者としてはありがたい状況にはなっています。ただ、生産量は増やさないといけないと国や県内で考えているところで、今後色々策を練ったり、必要な技術を開発したりということが我々に求められていることになります。
では、生産規模の減少はなぜか、というお話になりますが、これも非常にシンプルで、作る人が減少しているということです。果樹農家を含む様々な作物を合わせた栽培農家数をみると、年を経るごとに減少していることがわかります。一方、残った生産者は、規模拡大を図り、近年は農家数に占める大規模農家の割合は高くなる傾向にあります。また、顕著になっているのは、農家数の減少問題に加え雇用労働力を確保することの難しさです。この問題は全国的に様々な産業で言われていることだと思いますが、農業の現場でもこの問題は出てきています。
規模拡大を進めることで、必要な労働力は増加しますが、他産業との競合もあって労働力の確保は非常に難しくなっています。特にミカン栽培の場合、通年で雇用できるわけではなく、収穫の時期だけたくさん人が欲しいというような労働集約的季節雇用ということで、人を集めるのは非常に難しい要因があります。これが人員確保の難しさにより拍車をかけているという状況があります。静岡県や全国のミカン生産現場で起こっている問題になります。
農業と無人航空機
農業の担い手が減少して労働力を確保するのが難しくなってきている問題を解決していくために必要なこととして、新しい農業技術であるスマート農業の研究開発が盛んに行われるようになっています。このスマート農業について、私なりの解釈をお話しします。普段人間が畑でやっていることを何かしらのツールを使って代替することがこのスマート農業の目的だと私は捉えています。
「普段人間が畑でやっていること」について説明しますと、「観察して考えて手を動かすこと」で、皆さん意識せずに感覚(五感)を使って行っています。「観察」とは目で直接作物の様子を見たりすることになります。感覚は圃場の気温が高い、ちょっと湿気が多い、みたいなものです。「考えて」は頭で考えた結果をもとに「手を動かす」。大きくこの三つの動作に区分できると思います。
それを何かしらのツールで代替するというスマート農業では、センシングが目と感覚に該当するのかなと思います。センシング技術で情報収集し、頭脳である人工知能で情報処理をして、動作の部分としてロボットが何か処置をするということです。そしてその結果をセンシングする、というサイクルでスマート農業を回していくことになるかと思います。あとはそれぞれの要素を繋いでいくための情報通信の技術も、あわせて求められていきます。これがうまく回ることによって、栽培管理が省力化、効率化、高度化し、あわよくば人が管理していた従来よりも精密な管理が行われ、より高品質な生産ができるのではないかという期待もされているところです。
続いてはそれぞれの要素について、研究開発が期待される技術として整理し紹介いたします。人の器官に着目して、代わりとなる技術の研究開発が必要かという点です。
まず目と感覚に変わる部分としましては情報収集センシングの部分になります。そこを今回のテーマにもなっているドローン、無人航空機、センサーなどを使って人の目や感覚の替わりができないかという点になります。
続いて、頭脳は、AI人工知能です。AIを使って画像認識をしたり、目や感覚がセンシングし情報収集したデータを解析するところなどでAIが必要になってきました。
最後に、動作ということで、機械やロボットが担うことになりますけど、現在薬散ドローンや自動走行車両などの研究開発が行われています。また、それぞれを繋ぐ人で言う神経に相当する部分として情報通信技術が必要になってきまして、最近言われているIoTや5Gなどの技術が、神経の役割を果たしていくのではないかと考えております。
農業における無人航空機の利用は、結構昔から行われており、1980年代には開発が開始されました。最初に出てきたものは農薬散布用の小型の無人ヘリコプターです。水田など栽培面積の広い作物に対して、農薬を散布することを目的に開発されたものです。現在、この小型無人ヘリコプターの国内運用体制は、登録機体数が約2,800機、認定オペレーターが約11,000 人います。全水田の面積の約30%は、この無人ヘリコプターによる防除が行われているというデータになります。ただし、導入には条件があり、高い操縦機能を要するためなかなか簡単に操作できるものではありません。また、狭い園地や傾斜地でも利用は困難です。静岡県の果樹園は傾斜地や狭い場所に位置する園地もあり飛行が困難なため、これまで果樹生産に利用されることはありませんでした。
2010年代頃になると、小型マルチコプターといって、今よく皆さんがドローンと言われているような小型の機体が出てくるようになりました。これが一つの転換点になっているかと思います。
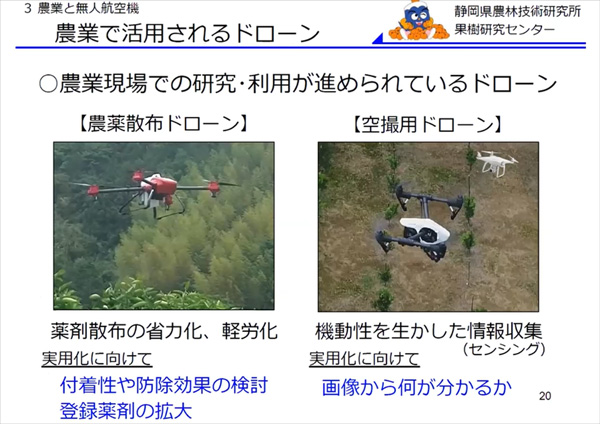
それが実現したのは、技術の発展によって飛行に必要な装置の小型化、低廉化によって部品が入手しやすくなったことが大きい理由かと思います。それを支えた技術革新としてバッテリー技術の発達があります。高出力で軽量なリチウムイオン電池の開発です。あとは姿勢維持装置の小型化低価格化です。現在はどのドローンにも搭載されているGPS、IMU(ジャイロセンサー)も小型化し安くなりました。あとは機体の頭脳に相当するICチップも小型化低廉化したなど、いくつかの技術発展によって安価で高い飛行能力を実現した小型ドローンが開発されました。さらに操作性に関しても先ほどの無人ヘリに比べるとかなり良くなっています。私も操縦技能講習を受け、研究の場面では空撮を行っていますが、操作が簡単にできるものになっています。そういった小型のドローンができてきたことによって、いろんな産業で利用が検討されています。土木測量、報道、物流、エンタメ、防災、農業林業といった分野で、実際の利用が検討されており、果樹園での利活用というのも当然期待が高まってきたところです。農業で利用するために現在研究開発が進められているドローンとしては、大きく分けると主に農薬散布ドローンと空撮用ドローンの2種類になるかと思います。
-
農薬散布ドローンは名前の通り農薬を散布するドローンで、薬剤散布の省力化、軽量化が期待されます。特に傾斜地では、人がノズル付きのホースを引っ張って登り、動力噴霧器を使って薬剤を散布しています。この農薬散布ドローンは、傾斜地を登らなくてもある程度機体が見える距離なら薬剤を散布できるということで、非常に省力化が期待されます。実用化に向けては薬の着性やその向上効果の検証が行われ、あとは空中散布用できる薬剤がまだ少し限られているため、登録薬剤を拡大するための取り組みも行われています。
一方空撮用ドローンについては、その機動性を生かした情報収集、センシングが期待されます。実用化に向けて、撮影した画像からどのような情報がわかるのかを明らかにすることが課題であり、当センターで現在取り組んでいるところです
-
空撮用ドローンを使ったドローンセンシングの可能性についてです。ドローンセンシングではセンサー類を使って作物を測定し数値化を行うことが目的になります。空撮用ドローンの場合そのセンサーは、様々なカメラになります。現在、可視カメラ、マルチスペクトルカメラ、赤外線カメラの3種類の搭載が比較的簡単にできます。
出席の皆様には、釈迦に説法のような話になってしまいますが、可視カメラにつきましては、人の目と同じような色みの画像をとり、マルチスペクトルカメラでは近赤外とか、レッドエッジやRGBについてそれぞれの特定領域の波長を可視化します。赤外線カメラは、物体が放出する熱を視覚化し物体の表面温度を捉えます。ドローンには、これらのセンサーの搭載が可能ですが、我々としては人の目で見ているものを、画像を使って解析することを目的として、まずは可視カメラを使って、技術の構築に取り組んでいます。今回そのツールとしてドローンを用いていますけど、画像を撮るというのは航空機や人工衛星でも当然できることです。センシングの歴史みたいな話になりますが、航空機によるセンシングは1910年代、人工衛星では1950年代にはもう始まっているということで、画像によるセンシングは結構古くから行われています。
その中でも今回ドローンを使った優位性とは、やはり機動性と、高解像度画像の二つになるかと思います。ドローンと人工衛星、それぞれでその項目ごとに情報を整備しました。ドローンの解像度は飛行高度には依存しますが、mm単位の解像度の画像が取得でき、小さなミカンの花も見える画像を取得できます。
機動性では、衛星と比べると比較的撮りたいときに撮影ができ、何か畑で管理作業をする前に撮ったデータを解析して、その結果をもとに作業ができる、そういった有意性の部分に着目してドローンを使っています。
ドローンでミカン園を撮影
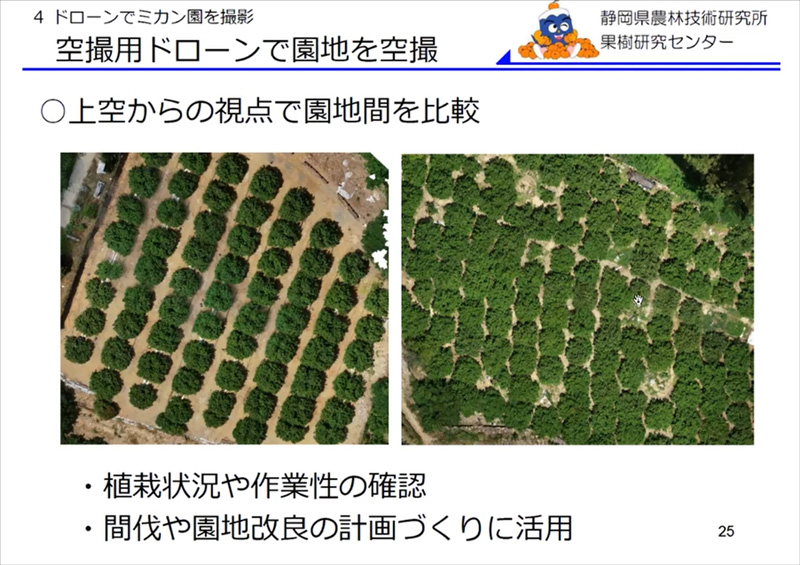
約10アールの畑を高度30mぐらいから撮影しましたが、ミカン園地を上空から自分の目で見ること自体が今まで全くなかったもので、それだけでも結構いろんな情報が得られました。例えば上空からの視点で園地間を比較した場合ですが、片方は結構通路も確保されて比較的作業しやすい一方、別の畑はかなり木同士が引っ付いているような場所もあることがわかります。このような上から見た画像を用いて、生産者の方に対して、「そろそろ間伐した方がよいのではないか」と助言をできると考えています。あとは、間伐や園地改良の計画作りです。作業用の機械を使用するために、どの辺に樹を植えていくといいかなとか、そういう計画作りにも活用していけると考えています。
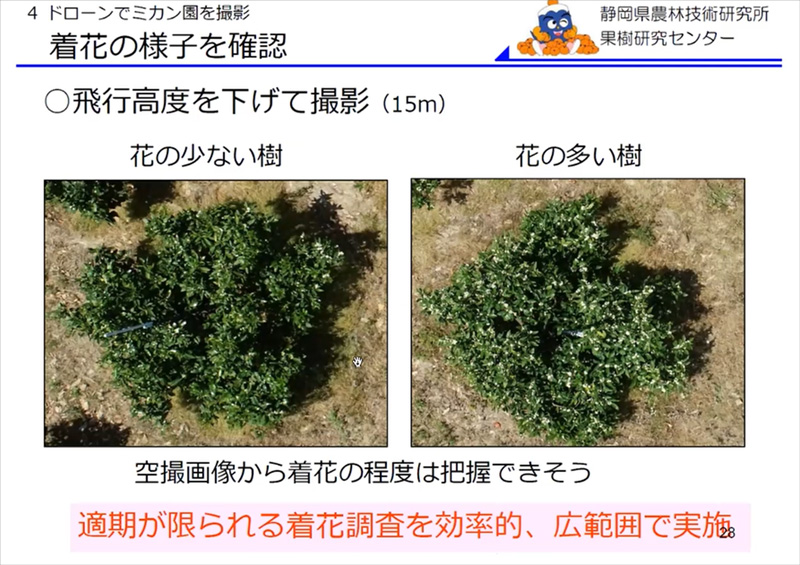
続いて、5月の開花期に撮影した画像になります。拡大画像では、ミカンの白い花が咲いています。この左側の青で丸く囲ってある樹は、右の樹と比べると白い部分が少なく見えます。つまり、これだけでも着花の量がある程度把握できそうなことがわかります。ミカンの花が開花している時期は比較的短くて10日から2週間程度になります。調査ができる期間というのが限られますのでドローンでとりあえず画像を残しておけば、後で見返すこともできます。適期が限られる調査を効率的、広範囲で実施することができると思います。
同じように今度は着果している樹を撮影したところ、収穫直前の着色果実では既に橙色に色がついています。色がついた果実は色の区別でかなり着果の状況がわかります。
8月~9月頃の着色前の果実の画像も形から何とか結実状況を把握できそうということで、空撮画像から実の付き具合も確認できることがわかりました。このようにドローンで上空から画像を撮るだけでも、これまでわからなかった様々なことが情報として取得できることが期待できます。しかし、我々はただ画像を撮るだけではなく、画像から例えば実が何個ついているというような樹の生体情報を数値化する技術を開発することを目的に研究をしております。
ドローンセンシングの研究内容
研究の背景として、温州ミカン生産における大きな課題があります。隔年結果の是正というのが一つ大きなテーマになっています。温州ミカンは、着果量が多い表年と少ない裏年を交互に繰り返すという特徴がありまして、多く取れた年の翌年はとても少なく、逆に少なかった年の翌年は多くなるという、もともとの樹木としての特徴があります。ですが、上手く栽培管理を行うことで、波をなるべく小さくすることはできます。実際に隔年結果が比較的平らになっていった年もあったのですが、近年は隔年結果の傾向がかなり強くなってきてしまいました。
これには環境的なものなどいろんな要因がありますが、ここでは人的な要因として、着果管理が不十分という点に着目しました。通常ですと8月から9月に摘果作業を行いますが、実が多くつきすぎている樹に対しては、緑の実を人の手で落として数を調節してあげることで、翌年もある程度着果が確保できる状態にします。ただこれが不十分だと隔年結果してしまいます。さらにその人的な要因を掘り下げてみると、生産者が高齢化して着果管理ができないことがあります。摘果は8月、9月の非常に暑い時期の過酷な作業になります。最近でも高齢の農業者の方が熱中症で亡くなられてしまうような事故は結構起きています。また、規模拡大による弊害として管理しないといけない樹が増えます。するとパート雇用などの非熟練者が摘果作業を行います。適正な着果管理についてもう少し詳しくお話しすると、適正な着果量は、着果させる果実数と樹全体の葉数のバランスである「葉果比」で説明されます。
摘果する果実については、大きすぎたり小さすぎたり、傷がついてしまっていたり、病虫害の被害を受けた果実などを選別し落としていきます。この作業にあたって、これまでは熟練者によって適正な着果量とか摘果についての見極めができていましたが、大規模栽培で雇用労働者、特に慣れてない非熟練者には、落とすべき数や果実がわからないという現象が起きています。どれを落とせばいいかというのは、まだ教えやすいかと思いますが、どれだけ落とすかがなかなか難しい。園主が園地や樹ごとの作業指示をするために事前に状況を把握していればいいのですが、園地の巡回には非常に時間を要します。そのため客観的な指示が難しくて、作業がうまく回らずに隔年結果が起きているのではないかと考えています。
また、隔年結果対策として季節ごとの管理作業でいくつかポイントがあります。先ほどまでは夏の時期の摘果のお話をしましたが、5月の開花期に対策として、花が多い状態だったら数を減らす薬剤を散布し、逆に少なければ花ではなくて芽が多く出る状況になりますので、その芽の数を減らしてあげるなどの管理をします。また、収穫後の冬場2月以降に剪定作業を行いますが、これもその樹が表年か裏年の状況かで、優先度が変わってきます。このように樹の状態によって管理作業や対策が変わってきますが、それぞれの園地に対してどのようにどの程度処理をするかを決めるためには、やはりあらかじめ把握しておいた方が合理的でいいと考えています。そこで空撮用ドローンの画像を利用した画像解析技術開発に取り組んでいます。
具体的には、空撮用ドローンでミカン園を空撮し、画像処理ソフトを使用して三次元点群やオルソモザイク画像を作成して生体情報を解析することに取り組んでおります。
次の話も、もしかしたら皆さんも既にご存知の内容かもしれません。ミカン園を井の字型に経路を作ってドローンを飛行させて、撮影した多数の画像を処理して三次元点群とポリゴンメッシュを作成します。オルソモザイク画像につきましても、1枚の画像と比べたときに生じる歪みを直すために、オルソモザイク画像を作っています。続いて、様々な生体情報を三次元点群等から測定していくことについてご説明します。先ほど葉果比についてお話しましたが、青島温州ミカンの場合ですと、大体葉っぱ30枚に対して果実を1つ付けるような形で着果管理を行うと生産量が安定するという知見が、過去の研究調査からわかっています。それを実行するために、どれくらい葉っぱがあるのかを推定する手法を検討しました。温州ミカンはその外観上の特徴として、葉っぱが集合しているような感じに見えます。そこに着目しまして、その樹の葉数と樹木の容積に関係があると推測し、3次元点群から作成したポリゴンメッシュの容積を計測すると、樹容積と葉数の間に相関があることがわかりました。そこから予測モデルを作って、葉っぱの枚数を樹容積から推定する技術を開発しました。これによって、まず、葉果比における葉の部分を推定できるようになりました。
続きまして3次元点群による花・着色果実の推定技術の検証です。花の時期や収穫前の色がついた果実の時期に撮った画像からRGBの色情報が3次元点群へ引き継がれますので、このように花や果実も点群で捉えることができます。この点群を利用して、花に相当する点や、着色している果実に相当する点の数を測定して、実際の花の数ですとか、果実の数と関係性を調べてみると、こちらもモデル式から、ある程度推定できることがわかっています。これができると花の時期も、「葉花比」というものがありまして、また収穫時点では葉果比になりますが、最終的に着果管理がうまくいったかを評価するための計測技術となります。
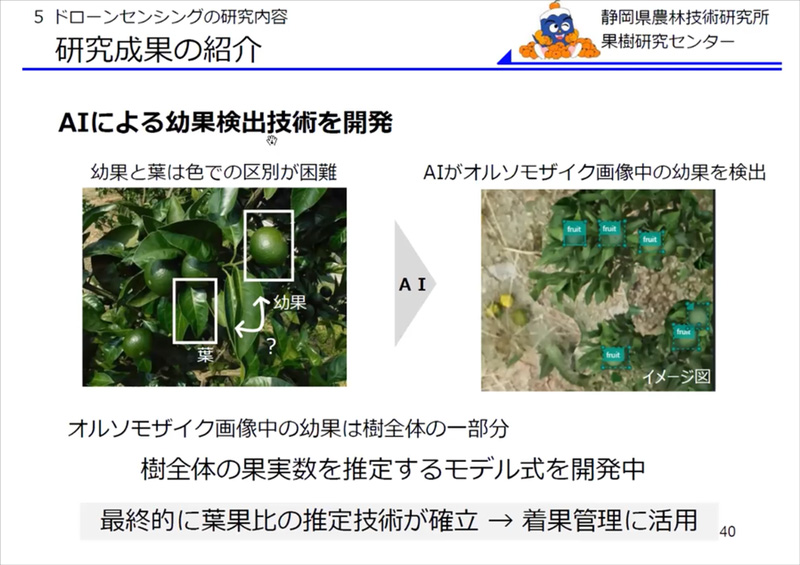
では、摘果前にその葉果比がわからないのか、ということですが、幼果つまり緑色の果実は、葉っぱと同じ色をしているために、先ほどの推定技術が使えなません。この研究課題の中では、AIを使ってオルソモザイク画像中の幼果を検出する技術も開発し、それを利用しています。ただ、オルソモザイク画像中の幼果は樹全体の一部でしかなく、樹全体の果実数を推定するモデル式を開発する必要があり、現在取り組んでいます。これができれば、最終的に葉果比をもとにした着果管理に活用することができます。

社会実装に向けた取り組み
開発した技術を社会実装して取り組みたい項目は、隔年結果の是正です。そのため、リモートセンシング、ドローンセンシングを活用して葉果比を把握し、適正な着果管理を行う必要があります。
空撮して、3次元点群データやAI検出技術を使って、葉数、幼果数、葉果比を算出し、そこから青島温州ミカンの適正数30に持っていくためにどれくらいの果実を落としたらいいかを診断する技術の実装を目的に研究を行っております。
それぞれ開花期、摘果期、収穫期に必要な断項目を診断していきたいと考えています。着果量や葉果量は、実際に畑で管理する上で必要な項目になっています。
作柄予測については、産地内の広い畑でドローンセンシングが実行できれば、産地全体として、今年度産のミカンの作柄予測ができるのではと期待しています。
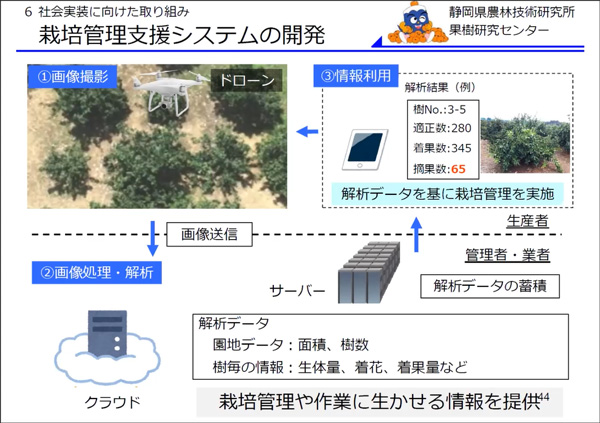
その診断に合わせて、それぞれの時期に対策を実行してもらうために、栽培管理支援システムを構築しているところです。空撮画像をクラウドに送って解析し、生産者にはその解析結果だけを返すやり方です。そのため、生産者として情報を得るために何か新しい作業が発生することは特にありません。現在、出てきているいろいろなスマート農業技術は、農家さんにいろいろと負担を強いるような点が障害となってなかなか導入が進まないという事例が結構あります。今回考えているものについては、なるべく農家さんの手を煩わせない、もちろん金銭的な負担はいただくことにはなると思いますが仕事量としては増えないシステムにしたいと考えています。
-
最後にシステムの開発実装体制です。
現在RESTECさんにも共同研究機関として参画いただき、主に診断技術の開発に力をお借りしております。診断技術の実証については、県内のJAや大規模生産者と進めています。また、実装を考えたときに必要となる3次元点群の作成については、スカイマティクスさんにも共同研究に参画頂き、実装していく中で技術協力をいただいています。これができれば、生産者は隔年結果の是正に生かすことができ、産地としては作柄や収量予測に生かせることが期待されます。
現在の進捗は、大きく分けて解析技術開発と解析の自動化の2つに構成されています。解析技術については、葉花比、葉果比推定の要素技術開発が概ねできており、現在は推定技術の現地実証を行い、フィードバックをしながら技術開発に修正等を加えています。解析の自動化についても同じような形で進めており、すべて自動化する技術へ取り組んでいるところになります。
目標としましては、令和6年後中には試作システムを完成させるようなスケジュール感で進めていくことになります。研究の紹介としては以上になります。 -
ご清聴ありがとうございました。